Aplikasi Rotary Potentiometer
Contoh 1.
Misalkan saat wiper berada di atas output (gambar 2.4) yang dihasilkan 10V yaitu pada sudut 350°, sedangkan saat wiper ditengah menghasilkan output 5 V yaitu pada sudut 175°. Maka berapakah tegangan yang dihasilkan pada saat wiper menunjukkan sudut 82°
Jawab:
Tegangan yang dihasilkan pada sudut 82°=82°x (10 V/350°) = 2,34 Vdc

Gambar Potensiometer sebagai alat ukur posisi
Potensiometer yang sedang dibicarakan sebenarnya adalah pembagi tegangan (voltage divider) dan akan bekerja baik jika arus listrik yang sama mengalir di seluruh tahanan potensiometer. Kesalahan pembebanan(loading error) terjadi saat wiper dari potensiometer dihubungkan dengan rangkaian yang memiliki tahanan input tidak terlalu besar dari tahanan potensiometer. Sehingga arus yang melewati wiper berkurang dan menyebabkan pembacaan tegangan menjadi berkurang. Hal ini dapat diatasi dengan rangkaian buffer impedansi tinggi misalnya menggunakan voltage follower yang dipasang diantara potensiometer dengan rangkaian yang diukur.

Contoh 2
Lengan robot pada gambar dibawah. berputar 120°stop to stop dan potensiometer digunakan sebagai sensor posisi. Pengontrol adalah sistem digital 8 bit dan perlu mengetahui posisi saat itu dengan resolusi 0,5°
Jawaban:
Untuk memperoleh resolusi 0,5°berarti seluruh 120°harus dibagi menjadi 240 kenaikan dan setiap kenaikan bernilai 0,5°. Bilangan 8 bit memiliki 255 tingkat (dari 0000 0000 sampai 1111 1111) jadi cukup untuk pekerjaan ini. Potensiometer disuplai dengantegangan 5V sehingga output dari potensiometer adalah 5V untuk sudut maksimum 350°(jika diasumsikan potensiometer dapat berotasi penuh). Tegangan acuan dari ADC (analog to digital converter) juga 5V sehingga jika tegangan keluaran potensiometer 5V berarti output digitalnya adalah
255 (1111 1111bin). Potensiometer berputar 350°tetapi lengan robot hanya berputar 120°sehingga perbandingan roda gigi 2:1. Dengan pengaturan ini potensiometer berputar 240°saat lengan robot berputar 120°

Gambar Potensiometer sebagai sensor putaran pada lengan robot
Misal saat lengan robot berputar 10°maka potensiometer akan berputar 20°. Dan tegangan potensiometer adalah : 20°x (5 V/350°) = 0,29 V. Tegangan ini akan diubah oleh ADC menjadi besaran digital : 0,29 V x (255/5V) = 14,8 ≈15 = 0000
1111bin
Kembali ke masalah resolusi dari pengukuran ini adalah :

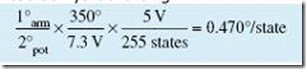
Ternyata resolusinya 0,686°sedangkan yang diminta adalah 0,5°untuk mengatasi hal ini. Untuk meningkatkan resolusi ini kita lihat kembali. Persamaan ini kita hitung dengan asumsi potensiometer mengeluarkan 5V pada 350°tetapi potensiometer sebenarnya hanya menggunakan 240°saja. Oleh karena itu untuk meningkatkan resolusi dapat diatur dengan meningkatkan tegangan 7,3 V (5 V x 350°/240°). Sehingga resolusinya sekarang:

Resolusi ini masih dalam jangkauan 0,5°sesuai spesifikasi