Sistem Kontrol Kecepatan
Kemudi Mobil
Sebagai Suatu contoh sederhana dari sistem kontrol terbuka, bias dilihat pada gambar 2.11, yaitu kontrol kemudi mobil. Arah dua roda depan dapat dianggap sebagai variabel yang dikendalikan atau keluaran (y) arah dari roda kemudi adalah sinyal penggerak atau masukan (u). Sistem kontrol kemudi mobil ini masih menggunakan sistem mekanis, karena memang unsure mekanis yang membentuk sistem kontrol ini.
Sistem kontrol, atau proses pada masalah ini, terdiri dari mekanisme kemudi dan dinamika seluruh mobil.
Walaupun demikian, jika tujuannya adalah untuk mengendalikan kecepatan mobil, maka besarnya tekanan yang dikerahkan pada pedal gas adalah sinyal penggerak, serta kecepatan kendaraan adalah variable yang dikendalikan. Secara keseluruhan, kita dapat menyatakan bahwa sistem kontrol mobil yang sederhana merupakan satu kesatuan dengan dua masukan (kemudi dan pedal gas) dan dua keluaran satu tujuan dan kecepatan.
Dalam kasus ini, dua pengendaliandan dua keluaran tidak bergantung satu dengan yang lainnya, tetapi pada umumnya, terdapat sistem yang pengendaliannya saling berhubungan. Sistem dengan masukan dankeluaran lebih dari satu disebut sistem banyak variabel. Idle mobil loop terbuka Selain menggambarkan sistem kontrol kemudi, pada gambar 2.11 juga menggambarkan sistem control kecepatan idle dari satu mesin mobil.
Sistem kontrol kecepatan idle mobil bisa dirancang dengan menggunakan dua jenis pengontrolan, yaitu dengan loop terbuka atau loop tertutup. Pada loop terbuka, tidak sulit untuk melihat bahwa sistem yang ditunjuk tersebut tidak akan memenuhi permintaan kinerja yang kritis. Misalnya, jika sudut katup :
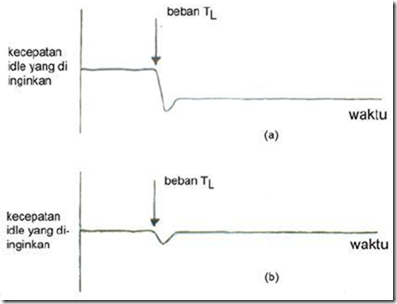
ditentukan pada nilai awal tertentu, yang berhubungan dengan kecepatan tertentu, ketika suatu torsi beban TL diberikan, tidak bisa dihindari suatu penurunan pada kecepatan mesin. Satu-satunya cara untuk membuat sistem tetap bisa bekerja adalah dengan menyesuaikan
sebagai reaksi terhadap perubahan torsi beban yang berguna untuk mempertahankan kecepatan mesin
pada nilai yang diinginkan. Unsur sistem kontrol terbuka biasanya dibagi atas dua bagian yaitu kontroler dan proses yang dikontrol, seperti yang ditunjukkan pada Gambar 2.12.
Suatu sinyal masukan atau perintah r diberikan ke kontroler, dimana keluarannya bertindak sebagai sinyal penggerak u. Sinyal penggerak tersebut kemudian mengendalikan plant yang dikendalikan sehingga variabel yang dikendalikan y akan dihasilkan sesuai dengan persyaratan yang telah ditentukan.

Gambar 2.13 Sistem Kecepatan Idle dengan Loop Tertutup
Dalam kasus sederhana, kontroler dapat berupa amplifier penguat), seperangkat alat mekanis atau kontroler lainnya tergantung jenis sistem. Dalam kasus yang lebih canggih lagi, kontroler dapat berupa komputer seperti mikroprosesor.

Gambar 2.14 Respon Sistem Kontrol Kecepatan Idle Loop Terbuka dan Tertutup
Karena kesederhanaan dan sifat ekonomis dari sistem kontrol loop terbuka, banyak ditemukan model sistem ini pada aplikasi yang tidak memerlukan ketelitian yang besar. Tujuan dari sistem ini adalah menghilangkan atau meminimumkan penurunan kecepatan ketika beban mesin digunakan